



































































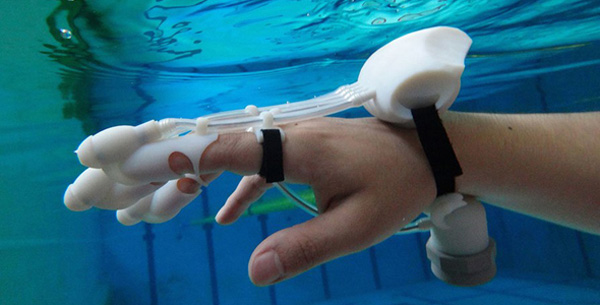
 Conçu par les candidats doctorants Aisen Caro Chacin et Takeshi Ozu de l’Université Tsukuba du Japon, le gant prend son nom du mot japonais pour les dauphins, « Iruka ». Comme ce mammifère marin, il utilise l’écholocation pour localiser des éléments sous-marins. Dans le cas de l’IrukaTact, cette fonctionnalité est fournie par un capteur sonar de télémétrie à ultrasons Maxbotix, qui pointe vers le bas à partir du poignet. Via un mini micro-ordinateur à bord, l’Arduino Pro, les signaux réfléchis du sonar de ce capteur activent trois micro-pompes.
Conçu par les candidats doctorants Aisen Caro Chacin et Takeshi Ozu de l’Université Tsukuba du Japon, le gant prend son nom du mot japonais pour les dauphins, « Iruka ». Comme ce mammifère marin, il utilise l’écholocation pour localiser des éléments sous-marins. Dans le cas de l’IrukaTact, cette fonctionnalité est fournie par un capteur sonar de télémétrie à ultrasons Maxbotix, qui pointe vers le bas à partir du poignet. Via un mini micro-ordinateur à bord, l’Arduino Pro, les signaux réfléchis du sonar de ce capteur activent trois micro-pompes.
Ceux-ci à leur tour émettent lancent des jets d’eau dans des bouchons de silicone portés sur chacun des trois doigts, appuyant sélectivement sur l’un ou plusieurs des doigts correspondants. Plus un élément sous-marin est proche d’un doigt, plus de la pression sera exercée sur ce doigt. Cela permet aux utilisateurs de sentir les contours du fond, ou tout autre objet immergé, sur lequel ils déplacent leur main. Le dispositif propose actuellement une portée du sonar d’environ 60 cm, bien qu’il existe des plans visant à améliorer cette distance. La puissance est fournie par une batterie intégrée au lithium-ion. Les chercheurs croient que le gant open-source pourrait également trouver une utilisation dans des applications de réalité virtuelle telles que « la simulation d’objets numériques dans des environnements aqueux. »











{kind=link}